?️ INTERVIEW ?️
Zoom sur les acteurs du développement de ce simulateur innovant, ou comment expertise médicale et technique s’associent pour co-construire le futur de la formation en robotique chirurgicale.


Dr. Barbara Seeliger
Elle est chirurgienne spécialisée en chirurgie viscérale. Son parcours est focalisé autour de la chirurgie mini-invasive, qu’elle découvre à Strasbourg en 2003 dans le service de chirurgie du Professeur Marescaux et à l’IRCAD. De par son expérience chirurgicale et sa connaissance de l’écosystème de la robotique chirurgicale, elle apporte son expertise médicale sur le projet.
“Pour moi, l’avenir comprend nécessairement la chirurgie mini-invasive car il y a une meilleure récupération pour les patients, ce qui est non négligeable. Il y a encore beaucoup de progrès à faire avant d’implémenter la robotique de manière systématique, mais il y a un grand avenir pour ces technologies. »

Brice Valentin
Il est ingénieur en technologie de l’information pour la santé, et a rejoint InSimo il y a 6 ans. Dans le cadre du projet ROBOTiS, il est à la fois chef de projet et développeur. Il découvre la chirurgie robotique au travers de sa formation et le projet ROBOTiS lui donne l’occasion de continuer dans cette voie.
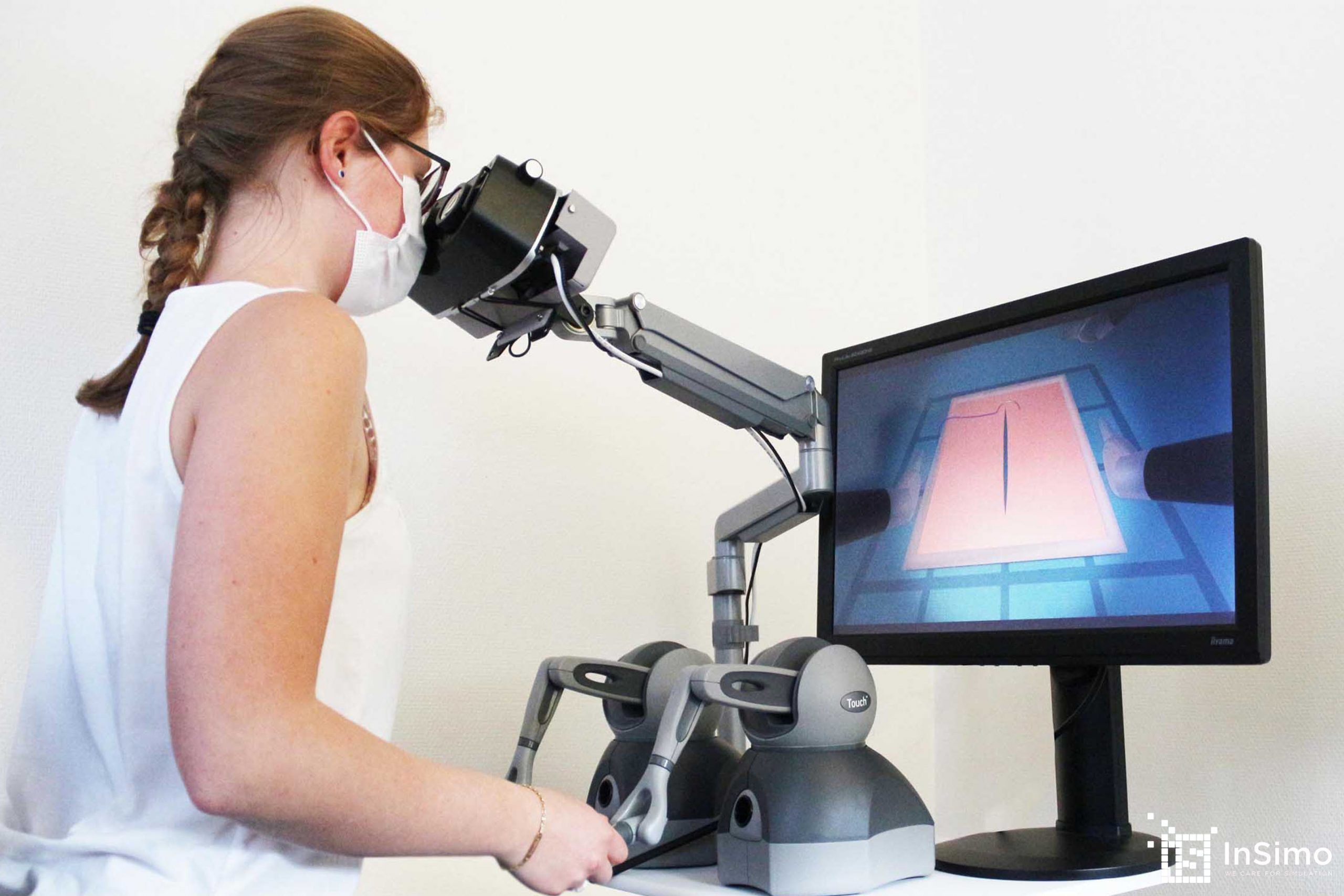
“ROBOTiS répond a un réel besoin de formation des chirurgiens sur les systèmes robotiques en laparoscopie. Notre simulation de fil haute fidélité permet une manipulation réaliste et un contrôle précis de la formation d’un noeud. »

Pierre-Jean Bensoussan
Pierre-Jean est le CEO d’InSimo. Avec ROBOTiS, il veut permettre à InSimo d’accompagner l’évolution du marché de la robotique en offrant aux nouveaux acteurs entrant une solution pour former rapidement des chirurgiens à l’utilisation de nouveaux robots.
“Pour nous c’était très important de ne pas adresser uniquement les besoins d’un seul industriel de la robotique chirurgicale. Ces dernières années, on observe l’émergence de plein de nouveaux systèmes robotiques, et de fait, un besoin de formation croissant pour amener les chirurgiens à prendre en main ces nouveautés”.
« ROBOTiS : Une offre logicielle générique pour l’apprentissage de la chirurgie robotique »
Si vous deviez décrire le projet en quelques mots ?
Brice : “ROBOTiS est issu de la volonté de proposer une simulation de chirurgie robotique dans laquelle le focus technologique a été porté sur la simulation de la suture. Les simulateurs concurrents sont encore limités sur cet aspect, c’est pourquoi on s’est intéressé à cette niche, afin de proposer une solution la plus réaliste possible.”
Simulation haute fidélité du fil dans ROBOTiS
(triple noeud)
En 2018 InSimo était lauréat d’un appel à projet européen en partenariat avec l’entreprise suédoise SenseGraphics (rachetée en cours de projet par Surgical Science) pour le projet DISSEcT. Le but de ce dernier était d’adresser les besoins d’Intuitive Surgical, acteur historique sur le marché de la robotique chirurgicale et fabricant du robot Da Vinci, à travers une offre logicielle générique de simulation pour l’apprentissage de la chirurgie robotique.
Au fil du projet, les enjeux ont évolués et l’équipe a décidé de se re-focaliser sur des objectifs pédagogiques clairs, et notamment sur une simulation réaliste de la suture, gros manque dans l’offre de simulation actuelle. C’est ainsi que le projet ROBOTiS a vu le jour.
« Des objectifs pédagogiques axés sur les fondamentaux de la robotique chirurgicale »
Quelle est l’ambition de ROBOTiS ?
Pierre-Jean : “On veut proposer une offre générique pour pouvoir collaborer avec les industriels qui sont en train d’arriver sur le marché. C’est pour ça que notre simulateur ROBOTiS intègre les standards des instruments de la discipline et propose des objectifs pédagogiques axés sur les fondamentaux de la pratique de la chirurgie robotique. Notre objectif: rendre possible l’integration de notre technologie pour que n’importe quel industriel/ robot puisse se projeter dans l’utilisation de cette technologie.”
Barbara : “Dans un deuxième temps, l’ambition sera d’intégrer des scénarios chirurgicaux en passant des exercices de base à des exercices plus complexes. Il faudra réaliser des sutures pendant des gestes chirurgicaux placés dans leur contexte anatomique, comme des anastomoses intestinales, ce qui nécessite bien évidemment d’autres briques technologiques que la suture elle-même. »
Pierre-Jean : “Dans le domaine de la robotique il y a plein de champs d’application possibles de la simulation au-delà de la formation pure. On imagine un futur où la simulation permettra d’aider à la planification de certaines chirurgies, et un jour peut-être au pilotage plus ou moins automatique de ces robots, justement assistés par la planification opératoire. On pourra même trouver des applications dans la conception de ces robots. De nombreux domaines un peu connexes au training portent aujourd’hui l’innovation en simulation autour de la robotique chirurgicale. Le potentiel de développement est très important.”
« Dynamique et inextensibilité du fil : deux critères décisifs »
Pourquoi se concentrer sur la suture ? Quel challenge technique cela représente-t-il ?
Barbara : “En général, les simulateurs n’ont pas encore intégré de sutures réalistes. Que ce soit pour le passage du fil dans un tissu, comme pour la réalisation des nœuds, les compromis sont souvent peu fidèles et ne représentent pas dans le détail un geste pourtant essentiel pour toutes les disciplines de la chirurgie. Donc on a visé ce geste commun à toute chirurgie, pour pouvoir l’appliquer à la chirurgie robotique.”
Simulation haute fidélité
(suture continue)
Brice : “Techniquement, le problème de réalisme vient principalement de l’aspect inextensible du fil. Les fils ont généralement un comportement élastique, plus facile à simuler, mais qui ne correspond pas à l’objectif de réalisme recherché.”
Pierre-Jean : “A cela s’ajoute l’inertie. Dans de nombreux simulateurs, il y a un effet de flottement qui donne l’impression que le fil se déplace doucement. Ça facilite la simulation en évitant les collisions, mais ça crée un environnement peu fluide. Les deux critères décisifs sur ce projet sont donc la dynamique et l’inextensibilité.”
Brice : “Un autre défi technique est la gestuelle du nœud. Une fois le geste effectué, c’est généralement une animation qui prend le relais. Le nœud est donc figé, ce qui ne permet plus d’interactions et donc pas de possibilité de réajuster ou de faire coulisser, alors que c’est quelque chose de très important.”

Des comparaisons ont été faites entre fils simulés et vrais fils. L’équipe a observé la taille, le comportement et la forme du fil dans certaines positions, ou encore les effets de la gravité, puis a adapté le modèle simulé pour représenter au mieux la réalité.
Barbara : “Le but était de représenter le comportement réel du fil. Faire un nœud chirurgical peut être assez simple à condition que le fil dans le simulateur reproduise fidèlement la réalité du geste. Au contraire, il est très difficile d’enseigner le geste si le fil ne se comporte pas de façon réaliste.”
« Pratiquer pour apprendre »
Comment avez-vous été amené à collaborer avec Barbara ?
Au début du projet ROBOTiS, l’enjeu était d’établir une collaboration étroite avec un SME (Subject Matter Expert) afin de s’assurer de répondre aux besoins réels du terrain.
Brice : “Pour nous c’était un réel manque, car on implémentait des choses sans réellement connaître leur utilité pédagogique, ou si c’était vraiment réaliste. (…) On côtoyait Barbara à l’IRCAD donc on a tout de suite pensé à travailler avec elle, et début 2020, la collaboration est née.”
Pierre-Jean : “A l’époque, on n’avait pas encore une simulation de suture fonctionnelle, et on ne pouvait même pas encore attraper le fil. L’état d’avancement du projet ne permettait pas de présenter un démonstrateur interactif sur ces fonctionnalités là. On a donc commencé à travailler avec Barbara pour identifier les idées de scénarios pédagogiques qu’on voulait intégrer dans le simulateur.”
Pour toi Barbara, quel est l’intérêt d’un projet comme ROBOTiS ?
Barbara : “Il était particulièrement intéressant de définir ce qui est important et pertinent d’apporter dans le monde chirurgical et dans l’éducation basé sur notre expérience dans un centre de formation chirurgicale. L’idée de proposer une alternative au simulateurs existants en développant une solution capable de surmonter les limites actuelles m’a tout de suite séduite.
« La suture est vraiment une compétence technique. On ne peut pas comprendre le geste en regardant des vidéos, il faut pratiquer pour apprendre, faire des centaines de nœuds pour acquérir un automatisme. C’est là qu’un simulateur de chirurgie robotique réduit le temps de pratique nécessaire sur la vraie machine, et son utilisation évite les coûts liés à la mise à disposition du robot pour cet entraînement.”
Pourquoi est-ce important de faire appel à un expert médical pour un tel projet ?
Tout au long du projet, les interactions entre l’équipe technique et Barbara sont nombreuses, afin de traduire les besoins chirurgicaux et techniques, et de déterminer comment les retranscrire dans la simulation.
Brice : “C’est très important de pouvoir échanger avec un expert pour aller dans la bonne direction d’emblée et éviter d’avoir du développement inutile. Il faut focaliser notre développement sur le fait d’avoir la meilleure valeur pédagogique puisque c’est ça qui importe le plus dans la simulation. Ce sont des experts comme Barbara qui utiliseront le simulateur à terme pour l’enseignement. L’utilisateur final doit être au cœur du développement dès le début et il est primordial de ne pas attendre la fin du projet pour faire tester le simulateur, mais de faire une intégration continue.”
« Plus on souligne les problématiques, plus on relève les besoins »
Quelles leçons retenez-vous de cette collaboration ?
Brice : ”Au début, il y a une phase d’adaptation. La traduction des termes médicaux peut représenter un challenge. Avec Barbara on a la chance d’avoir un expert qui a l’habitude de former des gens et dispose donc d’une pédagogie particulière. Elle nous a également appris à faire des nœuds, notamment à distance, en telementoring, à cause de la crise sanitaire.
Il y a aussi une notion d’honnêteté intellectuelle qu’on a des deux côtés. Barbara pouvait être très critique, elle n’a jamais fait quoique ce soit uniquement pour nous faire plaisir. Ça a été très important pour nous challenger sur le projet afin d’amener le niveau de réalisme beaucoup plus loin.”
Pierre-Jean : “La leçon principale que je retiens, c’est d’engager dès le départ un expert médical sur le projet, pour focaliser l’équipe sur la vraie plus value pédagogique. Il faut aussi éviter de s’engager dans de l’amélioration continue de technologie sans lien avec les utilisateurs finaux, mais aller de préférence vers une approche MVP (produit minimum viable) qui consiste à sortir très rapidement un démonstrateur, même s’il n’est pas parfait, et à le mettre directement entre les mains d’un chirurgien. Ça permet de voir comment va réagir l’utilisateur et ça apporte beaucoup d’informations. “
Barbara : “Plus on souligne les problématiques, et plus on relève les besoins, plus le résultat sera pertinent. Il est important d’échanger fréquemment et de rester centré sur les objectifs.”
« Un triple noeud en démo live ! »
Vous souvenez-vous d’un moment clé du projet ?
Pierre-Jean : “Un des moments qui m’a marqué, c’est quand j’ai vu Barbara faire un triple nœud lors d’une démo live ! Je pensais honnêtement qu’il y avait des étapes quasiment inaccessibles en termes de simulation. Ca fait des années que je suis dans des projets de recherche autour de la suture (…) je sais que c’est un sujet très complexe. Voir une chirurgienne manipuler le simulateur et enchaîner plusieurs noeuds d’affilée, c’est impressionnant.”

Barbara revient quant à elle, sur une démonstration effectuée en live en mars 2021 devant les membres de Surgical Science, partenaire historique du projet DISSEcT.
Barbara : “On se sentait à l’aise car on savait qu’on était en train de présenter quelque chose de bien. On était tous très excités de présenter ce résultat en live. On faisait confiance à la stabilité de la solution, qui nous a permis de faire des gestes sur demande, c’était super.”
« Une nouvelle collaboration avec l’Institut de Chirurgie Guidée par l’Image »
Quelle est la suite pour ROBOTiS ?
Brice : “On envisage de faire une étude pour comparer la vitesse de formation des chirurgiens entre l’utilisation de notre simulateur et une approche standard. »
Barbara : “Une autre étude plus immédiate est en cours pour identifier l’apport pédagogique des indications visuelles sur le fil. On montre par exemple la tension qu’on applique sur un fil avant de le casser, ce qui doit déjà permettre d’apprendre à le manipuler proprement.“
Brice : “L’idée est aussi d’amener le simulateur sur le terrain et de participer à des congrès comme celui de la Société Française de Simulation en Santé, ou d’autres, pour recueillir des feedbacks.”
Pierre-Jean : “On doit relancer nos collaborations industrielles ou en faire naître de nouvelles pour finaliser et améliorer l’existant. Enfin, Brice dirige actuellement un nouveau projet dans InSimo, nommé Ensist. Il marque une nouvelle collaboration avec l’IHU, dans la continuité de ROBOTiS, dans le domaine de la chirurgie endoscopique. Le module de suture élaboré dans ROBOTiS va être réutilisé et adapté pour ce nouveau projet.”
SUIVEZ-NOUS